Автор: Лаврентьев Кирилл
Автоматизированная система управления — это не просто шкаф с контроллером и набор датчиков. Это сложный программно-аппаратный комплекс, в котором программное обеспечение играет не менее важную роль, чем оборудование. Если аппаратная часть — это мышцы и скелет системы, то программное обеспечение — её мозг и нервная система. Именно программа определяет, как система будет реагировать на события, какие решения принимать в нештатных ситуациях, как взаимодействовать с оператором и смежными системами. Разработка и программирование АСУ — это инженерная дисциплина, требующая одновременно понимания автоматизируемого технологического процесса, знания промышленных контроллеров и владения языками программирования стандарта МЭК 61131-3. В этой статье последовательно рассматривается процесс создания программного обеспечения АСУ — от получения технического задания до финального тестирования на объекте.
Разработка любой АСУ начинается с технического задания, но практически никогда ТЗ не содержит готовых алгоритмов в форме, пригодной для непосредственного перевода в код. ТЗ описывает, что система должна делать, на языке технолога или проектировщика: «поддерживать давление на выходе насосной станции 4 атмосферы», «при переливе резервуара отключать насосы и выдавать аварию», «ротировать насосы по наработке». Задача разработчика — преобразовать эти требования в детализированные алгоритмы, которые можно запрограммировать.
Первый шаг — алгоритмизация, то есть составление формализованного описания логики работы. Для простых последовательных операций используются блок-схемы. Для сложных систем с множеством состояний — диаграммы состояний. Для логических взаимосвязей — таблицы решений. Алгоритмизация выполняет две важнейшие функции. Во-первых, она выявляет неоднозначности и пробелы в ТЗ. Когда разработчик пытается описать, что именно система должна делать, когда давление падает, а один из насосов уже в аварии, а резервный ещё не прогрелся, — вопросы к технологу возникают сами собой. Во-вторых, алгоритмизация создаёт документ, который понятен и технологу, и программисту, и специалисту по пусконаладке. Это общий язык, на котором обсуждается и согласовывается логика работы системы до того, как написан хоть один оператор кода.
На этапе алгоритмизации также принимаются решения о распределении функций между контроллером и верхним уровнем. Что будет делать ПЛК автономно, а что — SCADA-система? Общее правило таково: всё, что связано с быстродействием и безопасностью, реализуется в контроллере. Расчёты времени реакции защиты не должны зависеть от состояния сети и загруженности сервера. SCADA-система же берёт на себя долгосрочное архивирование, формирование отчётов и предоставление интерфейса оператору.
Выбор контроллера и среды программирования — это решение, которое влияет на весь ход разработки. В промышленной автоматизации существует несколько крупных экосистем, и переход между ними требует значительных трудозатрат.
Продукция Siemens с её средой TIA Portal и контроллерами SIMATIC S7 — это стандарт для крупной промышленности. Система мощная, поддерживает все языки МЭК, имеет огромную библиотеку готовых функциональных блоков, но требует дорогих лицензий и длительного обучения. Schneider Electric с EcoStruxure Control Expert и контроллерами Modicon — альтернатива, широко распространённая в энергетике и водоснабжении. Отечественные производители — ОВЕН, Segnetics, Прософт — предлагают контроллеры и среды, более доступные по цене и адаптированные под российские реалии, включая поддержку отечественных протоколов и интеграцию с реестром средств измерений.
Выбор контроллера и среды программирования определяется техническими требованиями: количеством каналов ввода-вывода, необходимым быстродействием, требуемыми протоколами связи. Для простых систем управления освещением или вентиляцией достаточно недорогого моноблочного контроллера. Для системы управления цехом с сотнями сигналов и горячим резервированием нужен модульный контроллер высокого класса. Также при выборе важен фактор долгосрочной поддержки: доступность запасных частей, наличие технической документации на русском языке, возможность обучения персонала заказчика.
Программирование промышленных контроллеров ведётся на языках, стандартизованных международным стандартом МЭК 61131-3. Стандарт определяет пять языков, из которых на практике наиболее часто применяются три, а два оставшихся используются в специфических случаях.
LD — язык релейно-контактных схем. Исторически первый язык программирования ПЛК, созданный для того, чтобы инженеры-электрики, привыкшие к релейным схемам, могли легко освоить программирование контроллеров. Внешне программа на LD напоминает электрическую схему: слева и справа — шины питания, между ними — контакты и катушки. Язык чрезвычайно удобен для дискретной логики: цепочки условий, блокировки, последовательности пуска и останова. Однако для сложных математических вычислений и работы с аналоговыми сигналами он неудобен, и его часто комбинируют с другими языками.
FBD — язык функциональных блоковых диаграмм. Программа представляет собой набор функциональных блоков, соединённых линиями передачи данных. Каждый блок выполняет определённую операцию — сложение, сравнение, ПИД-регулирование, таймер, — и имеет входы и выходы. FBD интуитивно понятен и удобен для реализации алгоритмов регулирования: на диаграмме наглядно видно, как сигнал от датчика проходит через фильтр, сравнивается с уставкой, обрабатывается ПИД-регулятором и поступает на выход. FBD — один из самых популярных языков в АСУ ТП благодаря сочетанию наглядности и функциональности.
ST — структурированный текст. Это текстовый язык высокого уровня, синтаксически напоминающий Паскаль. Он поддерживает все конструкции процедурного программирования: циклы, условные операторы, массивы, функции. ST незаменим для сложных вычислений, обработки массивов данных, реализации коммуникационных протоколов и нестандартных алгоритмов. Недостатком является более высокий порог входа: программист должен владеть навыками текстового программирования, а не только читать электрические схемы.
SFC — язык последовательных функциональных схем. Предназначен для описания логики работы системы как последовательности шагов и переходов между ними. Каждый шаг выполняет определённые действия, переход срабатывает при выполнении заданного условия. SFC идеален для дозирования, смешивания и других периодических процессов с ярко выраженной последовательностью операций. На практике SFC часто используется в сочетании с другими языками: шаги пишутся на ST или FBD, а последовательность задаётся на SFC.
IL — язык инструкций. Низкоуровневый текстовый язык, напоминающий ассемблер. В современных системах практически вытеснен языком ST и используется редко, в основном для поддержки унаследованного кода.
На практике программа для ПЛК редко пишется на одном языке. Типичная структура такова: основная логика блокировок и разрешений реализуется на LD или FBD, ПИД-регуляторы и аналоговая обработка — на FBD, расчётные модули и коммуникационные функции — на ST. Современные среды разработки позволяют свободно комбинировать языки в рамках одного проекта.
Программа контроллера работает циклически. Типичный цикл ПЛК выглядит так: прочитать состояние всех входов, выполнить программу, записать результаты в выходы, выполнить диагностику, перейти к следующему циклу. Длительность цикла зависит от объёма программы и быстродействия процессора и составляет от единиц до сотен миллисекунд. Это фундаментальное отличие от программирования для ПК: программа ПЛК не завершается, а бесконечно повторяется, и разработчик должен мыслить в логике «каждый цикл система проверяет условия и принимает решение».
Хорошо структурированная программа ПЛК состоит из функциональных модулей, каждый из которых отвечает за свою часть процесса. Типовая структура включает следующие модули. Модуль обработки аналоговых сигналов: масштабирование, фильтрация, проверка на достоверность. Модуль дискретных блокировок: цепочки разрешений, аварийные останова. Модуль управления исполнительными механизмами: пуск, останов, контроль срабатывания, диагностика обрыва цепи. Модуль регуляторов: реализация ПИД-законов, ограничение выходного сигнала, безударное переключение режимов. Модуль технологических защит: контроль предельных значений, отключение оборудования. Модуль связи: обмен с панелью оператора, SCADA-системой, смежными контроллерами. Модульная структура упрощает разработку, тестирование и последующее обслуживание — при модернизации меняется только нужный модуль, а не вся программа.
Параллельно с программированием ПЛК разрабатывается человеко-машинный интерфейс — то, что видит оператор на экране панели управления или компьютера. Программирование интерфейса — это отдельная задача, требующая не столько технических, сколько эргономических навыков.
Главный принцип — иерархичность. Оператор начинает с общего экрана, на котором видна вся установка в целом и основные параметры. При необходимости он переходит на экран конкретного узла, затем — на экран отдельного агрегата. Нельзя вываливать на один экран сотни параметров: оператор не сможет быстро найти нужную информацию и неизбежно пропустит критическое отклонение.
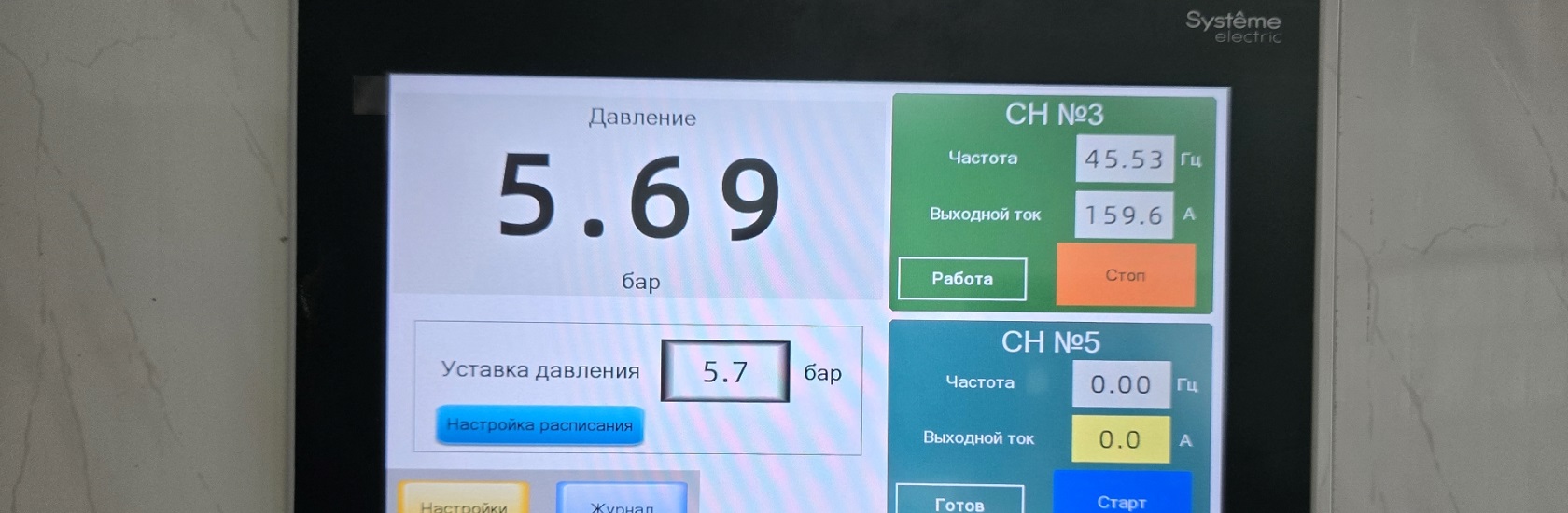
Второй принцип — цветовое кодирование. Зелёный — нормальная работа, жёлтый — предупреждение, красный — авария, серый — остановлен. Цветовая индикация позволяет мгновенно оценить состояние системы, даже не вчитываясь в цифры. Важно, чтобы цвета использовались единообразно во всей системе и соответствовали отраслевым стандартам и привычкам операторов.
Третий принцип — защита от ошибок. Кнопки критических воздействий (аварийный останов, отключение защиты) должны быть защищены от случайного нажатия — требовать подтверждения, удержания или ввода пароля. Поля ввода уставок должны проверять введённое значение на соответствие допустимому диапазону и отвергать заведомо опасные величины.
До выезда на объект программа ПЛК и интерфейс оператора проходят обязательное стендовое тестирование. Пренебрежение этим этапом — одна из самых дорогостоящих ошибок в автоматизации: проблемы, которые можно выявить и исправить за час в цеху, на реальном объекте могут потребовать дней работы и даже привести к аварии.
Стендовое тестирование проводится на собранном шкафу автоматики или на тестовом контроллере. Ко входам подключаются имитаторы сигналов — источники тока, генераторы, потенциометры, — которые воспроизводят поведение реальных датчиков. Проверяются все режимы работы: нормальный пуск, нормальный останов, реакция на отклонения параметров, аварийные сценарии. Для сложных систем разрабатываются программы-имитаторы, которые моделируют поведение технологического объекта в реальном времени и позволяют проверить алгоритмы управления без физического подключения к оборудованию.
Тестирование интерфейса проводится с привлечением будущих операторов. Опытный оператор быстро скажет, удобно ли расположены кнопки, понятны ли надписи и индикаторы, не раздражает ли цветовая гамма. Учёт этих замечаний на этапе стенда экономит массу времени и нервов при пусконаладке.
Программное обеспечение АСУ должно быть документировано. Комментирование кода — это не опция, а обязательное требование. Каждый функциональный блок должен иметь описание назначения, входных и выходных параметров, логики работы. Переменные должны иметь осмысленные имена, а не абстрактные «Х1», «Х2», «М3». Карты регистров Modbus, списки переменных для SCADA, таблицы уставок — всё это оформляется как документация, без которой эксплуатационная служба не сможет обслуживать систему после ухода разработчика.
Особое внимание уделяется резервному копированию. Исходный код проекта, финальная версия программы, загруженная в контроллер, все настройки и уставки — всё это сохраняется на нескольких носителях и передаётся заказчику. Потеря исходного кода означает, что любая модернизация потребует написания программы заново.
На объекте программа впервые встречается с реальным оборудованием. Пусконаладка — это проверка и корректировка алгоритмов в реальных условиях. Даже самая тщательная стендовая отладка не может учесть всех особенностей конкретной установки: инерционности трубопроводов, гистерезиса датчиков, люфтов исполнительных механизмов.
На этапе пусконаладки настраиваются ПИД-регуляторы: коэффициенты, подобранные «по теории», корректируются по реальной реакции системы. Проверяется отработка блокировок — не имитацией, а физическим воздействием. Уточняются уставки защит. Все изменения фиксируются и вносятся в документацию. По завершении пусконаладки подписывается акт о готовности системы к эксплуатации, и программа переходит в режим сопровождения.
Разработка и программирование АСУ — это инженерная дисциплина, в которой равно важны знание технологии автоматизируемого процесса, владение инструментами промышленной автоматизации и дисциплина документирования. Качественная программа для контроллера — это не просто код, который работает, а код, который понятен коллегам, устойчив к нештатным ситуациям и удобен в обслуживании. Инвестиции в тщательную алгоритмизацию, стендовое тестирование и документирование многократно окупаются на этапах пусконаладки и эксплуатации. И наоборот, экономия на этих этапах оборачивается затянувшимися пусконаладочными работами, нервотрёпкой на объекте и претензиями заказчика. Именно поэтому разработка программного обеспечения АСУ — это работа для квалифицированных специалистов, обладающих одновременно инженерным мышлением и навыками промышленного программирования.
